반응형
https://youtu.be/dr8VyvvFWsk?si=jHSTa7rScijCc8hb

Mobile ALOHA 란?

개요
- 프로젝트 이름: 모바일 ALOHA(양방향 원격조작을 위한 저비용 오픈 소스 하드웨어 시스템)
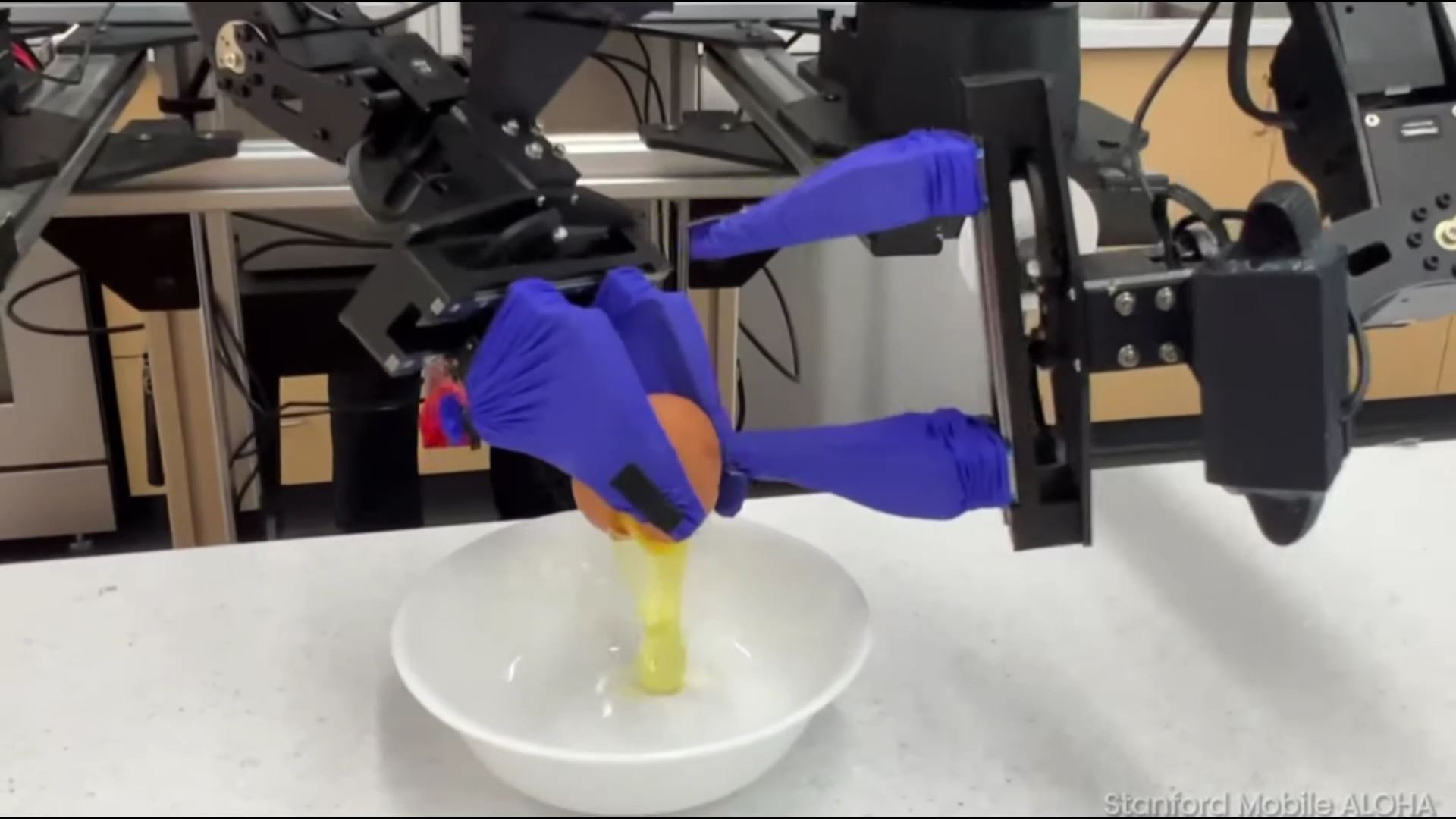
- 목표: 양손 및 전신 제어가 필요한 모바일 조작 작업을 모방하기 위한 시스템 개발.
- 주요 특징: 데이터 수집을 위한 저렴한 비용의 전신 원격 조작 시스템입니다. 모바일 베이스와 전신 원격 조작 인터페이스로 ALOHA 시스템을 강화합니다.

팀 및 지원
- 프로젝트 공동 리더: Zipeng Fu 및 Tony Z. Zhao
- 고문: 첼시 핀
- 지원: Stanford Robotics Center, Boston Dynamics AI Institute, ONR 보조금 N00014-21-1-2685.
기능
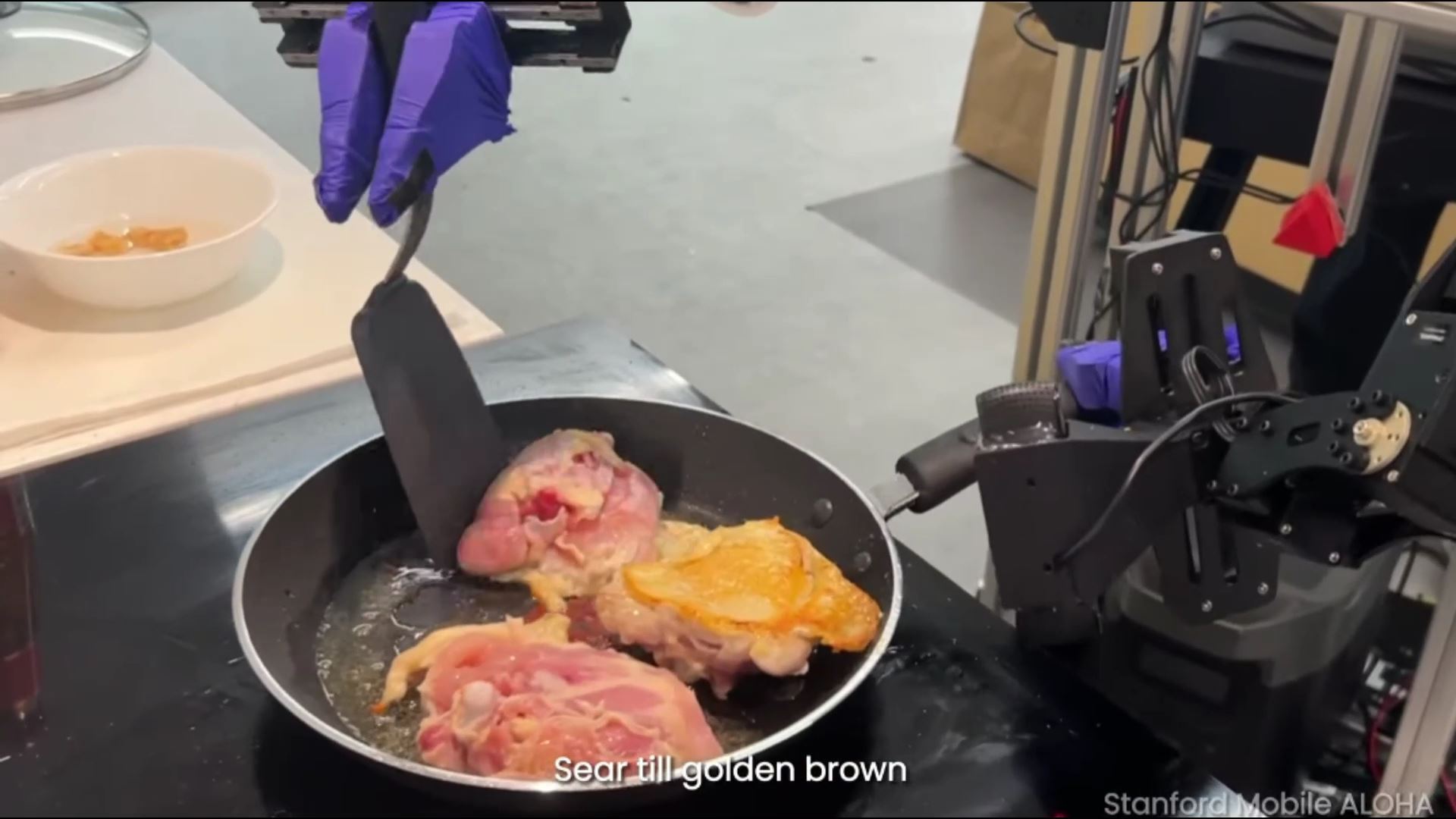
- 작업 범위: 요리(예: 새우 볶기 및 서빙), 2도어 벽 캐비닛 열기, 엘리베이터 호출 및 들어가기, 팬 헹구기, 냉장고 열기 및 닫기, 먼지 털기, 걸레질 및 일반 가사 작업.
- 원격 조작: 인간 조작자가 제어 시스템을 통해 로봇 팔을 원격 조작하여 훈련용 데이터를 캡처합니다.
- 자율성: 기존 ALOHA 데이터 세트와의 공동 훈련을 통해 로봇은 높은 성공률로 작업을 자동으로 완료할 수 있습니다.
- 모방 학습: 작업 실행을 위해 인간 시연을 통한 모방 학습을 활용합니다.

기술적인 측면
- 비용: 약 $32,000로 다른 유사한 로봇 시스템보다 훨씬 저렴합니다.
- 하드웨어 설정: 웹캠, 소비자급 GPU가 탑재된 노트북이 포함되며 이동성을 위해 바퀴형 베이스에 장착됩니다.
- 자유도: 모든 자유도의 동시 원격 조작을 위해 설계되어 복잡한 작업 실행이 가능합니다.
- 훈련: 섬세한 주방 작업과 다양한 집안일을 포함한 복잡한 작업에 대한 간단한 훈련 방법을 사용합니다.
연구 및 개발
- 모방 학습 및 공동 훈련: 심층 모방 학습을 위해 액션 청크와 트랜스포머(ACT)를 결합하여 최소한의 인간 시연으로 효과적으로 훈련합니다.
- 도전 과제 및 향후 작업: 정확성, 좁은 환경에서의 이동성 향상, 로봇의 부피를 줄이기 위한 더 많은 자유도 탐색에 중점을 둡니다.

제한 사항
- 폼 팩터: 현재는 부피가 크고 다루기 힘들기 때문에 좁은 공간에는 적합하지 않습니다.
- 자율성: 완전한 자율성은 아닙니다. 공동 훈련으로 인해 이전 방법보다 예제가 적음에도 불구하고 인간 운영자의 전체 시연이 필요합니다.

출판물 및 리소스
- 논문: arXiv(2024)에서 볼 수 있습니다.
- 웹사이트: 모바일 ALOHA

반응형
'IT' 카테고리의 다른 글
| 페이오니아 가입 방법. 아마존 전자책 판매를 위한. (1) | 2024.01.26 |
|---|---|
| 무료 상업 사용가능. 저작권 없는 폰트 글꼴 사이트입니다. 네이버 우아한형제들 카페24 눈누 (1) | 2024.01.22 |
| 미드저니 모델 버전별 그림 퀄리티 차이. (2) | 2023.12.05 |
| 미드저니 세팅 버튼의 역할과 설명 (1) | 2023.12.02 |
| 그림 생성 AI 미드저니 구독 취소 방법. (0) | 2023.05.18 |




댓글